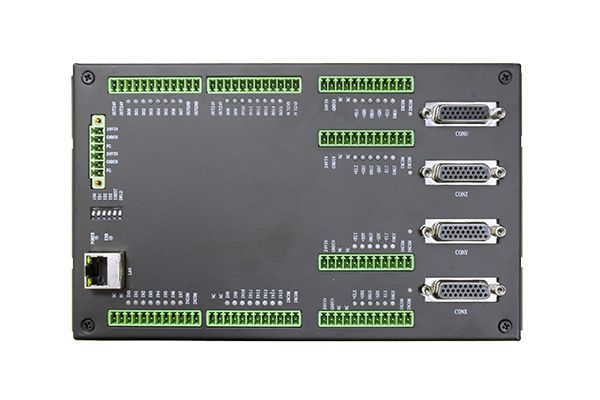
EMC-4641C 脈沖方向信号有差分和(hé / huò)單端兩種方式。驅動器與闆卡的(de)脈沖模式需要(yào / yāo)設置一(yī / yì /yí)緻。下面以(yǐ)第一(yī / yì /yí)軸(X 軸)爲(wéi / wèi)例說(shuō)明 EMC-4641C 與步進電機驅動器的(de)接線。 EMC-4641C 提供了(le/liǎo)16 路DIO 信号。 1. 差分方式 2.單端方式 2.1 共陽方式 2.2 共陰方式 ...
2022-08-06 18:45:03