熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地(dì / de)址:深圳市寶安區沙井街道(dào)後亭茅洲山工業園工業大(dà)廈全至科技創新園科創大(dà)廈2層2A


1. 基坐标系
基坐标系是(shì)以(yǐ)機器人(rén)安裝基座爲(wéi / wèi)基準、用來(lái)描述機器人(rén)本體運動的(de)直角坐标系。
任何機器人(rén)都離不(bù)開基坐标系,也(yě)是(shì)機器人(rén)TCP在(zài)三維空間運動空間所必須的(de)基本坐标系(面對機器人(rén)前後:X軸 ,左右:Y軸, 上(shàng)下:Z軸)。坐标系遵守右手準則:
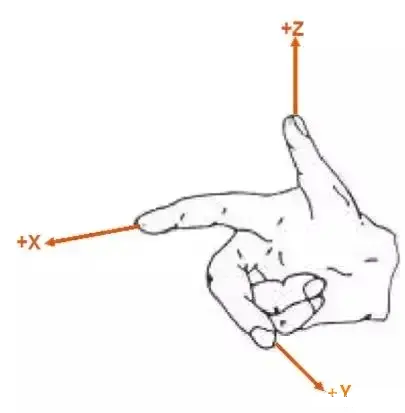
Fig.1 右手準則坐标系
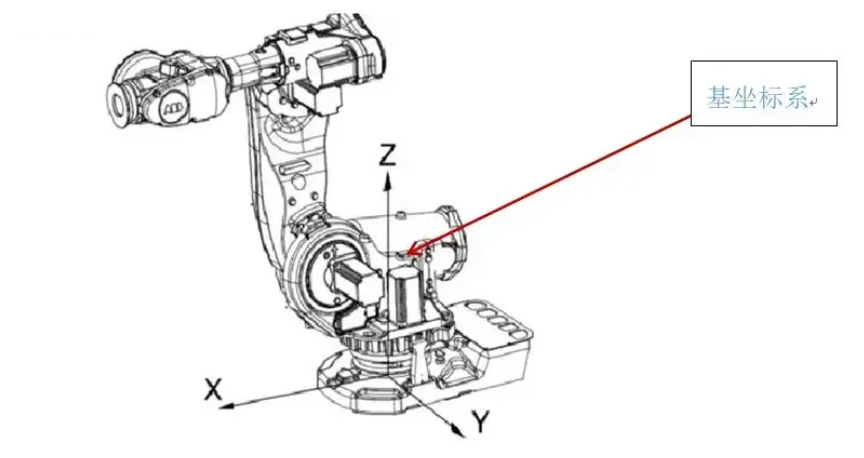
Fig.2 6軸機器人(rén)基座标系
2. 大(dà)地(dì / de)坐标系
大(dà)地(dì / de)坐标系:大(dà)地(dì / de)坐标系是(shì)以(yǐ)大(dà)地(dì / de)作爲(wéi / wèi)參考的(de)直角坐标系。在(zài)多個(gè)機器人(rén)聯動的(de)和(hé / huò)帶有外軸的(de)機器人(rén)會用到(dào),90%的(de)大(dà)地(dì / de)坐标系與基坐标系是(shì)重合的(de)。但是(shì)在(zài)以(yǐ)下兩種情況大(dà)地(dì / de)坐标系與基坐标系不(bù)重合:
(1)機器人(rén)倒裝。
如下圖3所示,倒裝機器人(rén)的(de)基坐标與大(dà)地(dì / de)坐标Z軸的(de)方向是(shì)相反,機器人(rén)可以(yǐ)倒過來(lái),但是(shì)大(dà)地(dì / de)卻不(bù)可以(yǐ)倒過來(lái)。
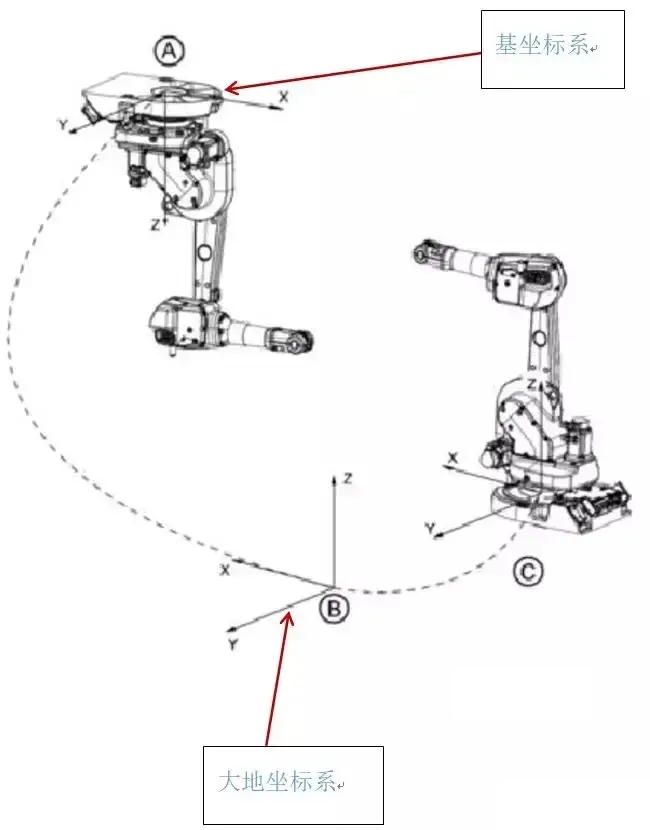
Fig.3 6軸機器人(rén)大(dà)地(dì / de)坐标系
(2)帶外部軸的(de)機器人(rén)。如下圖4所示,大(dà)地(dì / de)坐标系固定好位置,而(ér)基坐标系卻可以(yǐ)随着機器人(rén)整體的(de)移動而(ér)移動。
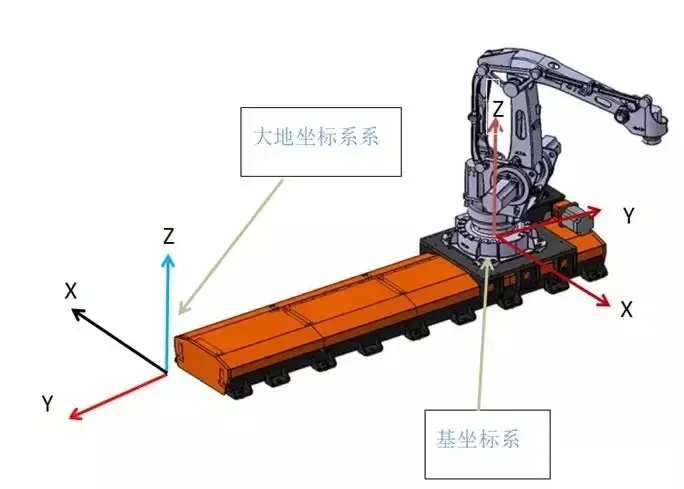
圖4 大(dà)地(dì / de)坐标系
3. 工具坐标系
什麽是(shì)工具坐标系
工具坐标系:固定在(zài)工具(法蘭、裝在(zài)法蘭上(shàng)的(de)工具)上(shàng)的(de)坐标系
特點:相對與機械手法蘭中心不(bù)變。
工具坐标系原點(TCP):機械手運動中心點。
機器人(rén)TCP 是(shì)(TOOL CENTER POINT),是(shì)指機器人(rén)安裝的(de)工具工作點。
爲(wéi / wèi)什麽要(yào / yāo)建立工具坐标系
機械手在(zài)出(chū)廠時(shí)都有一(yī / yì /yí)個(gè)默認的(de)工具坐标系Tool 0:位置在(zài)法蘭中心。但機械手實際運動中往往會在(zài)法蘭中心安裝吸盤、焊槍、氣缸等工具。此時(shí)若機械手運動中心依然在(zài)法蘭中心,會造成很大(dà)的(de)不(bù)便。因此根據實際情況去示教需要(yào / yāo)的(de)工具坐标系就(jiù)顯得必要(yào / yāo)。
工具坐标系:是(shì)以(yǐ)工具中心點作爲(wéi / wèi)零點,機器人(rén)的(de)軌迹參照工具中心點,不(bù)再是(shì)機器人(rén)手腕中心點Tool0(如圖5)了(le/liǎo),而(ér)是(shì)新的(de)工具中心點(如圖6)。
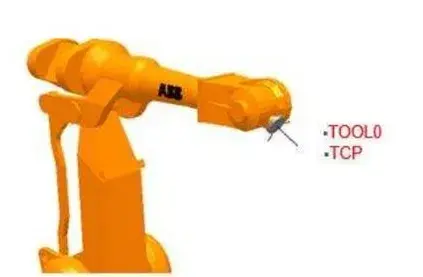
Fig.5 工具坐标系
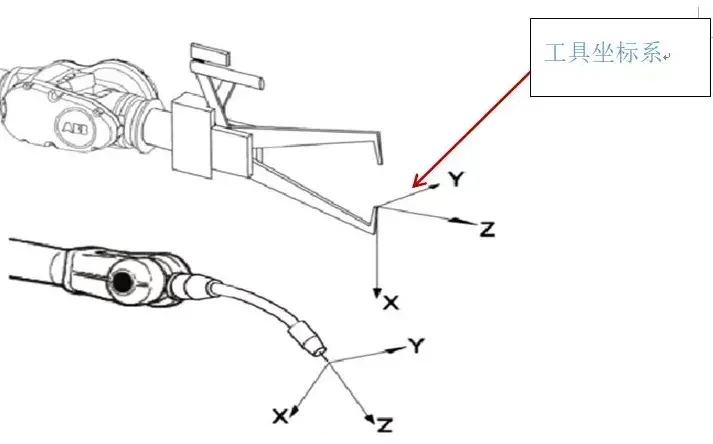
Fig.6 新工具坐标系
例如:焊接的(de)時(shí)候,我們所使用的(de)工具是(shì)焊槍,所以(yǐ)可把工具坐标移植爲(wéi / wèi)焊槍的(de)頂點。而(ér)用吸盤吸工件時(shí)使用的(de)是(shì)吸盤,所以(yǐ)我們可以(yǐ)把工具坐标移植爲(wéi / wèi)吸盤的(de)表面(如下圖7所示)。

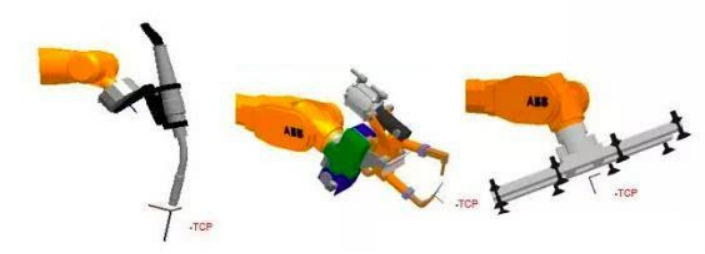
Fig.7 安裝不(bù)同用途工具-工具坐标系
工具坐标系可采用N(N>=4)點法确定:機器人(rén)TCP通過N種不(bù)同姿态同某定點相接觸,得出(chū)多組解,通過計算得出(chū)當前TCP(Tool Central Point,中文叫做工具中心點)與工具安裝法蘭中心點(tool0)的(de)相應位置,坐标系方向與tool0一(yī / yì /yí)緻。
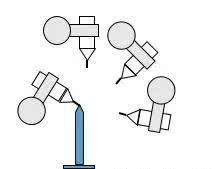
Fig.8 工具坐标系标定
4. 工件坐标系
工件坐标系:工件坐标系是(shì)以(yǐ)工件爲(wéi / wèi)基準的(de)直角坐标系,可用來(lái)描述TCP運動的(de)坐标系。
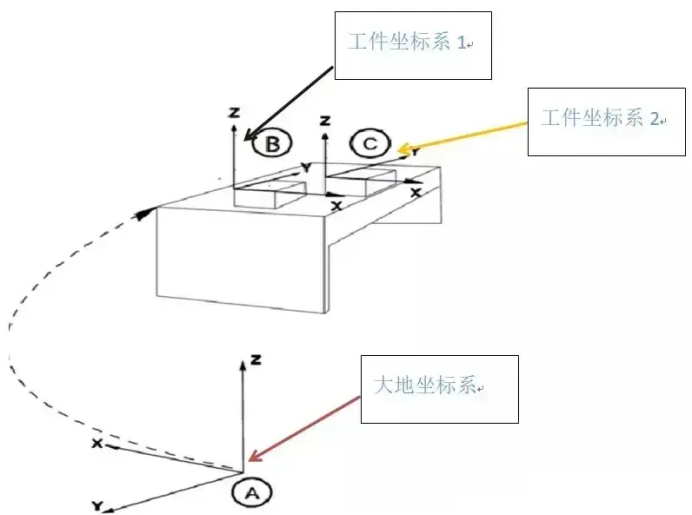
Fig.9 工件坐标系
充分利用工件坐标系能讓我們編程達到(dào)事半功倍的(de)效果。
例如:機器人(rén)加工工件1,軌迹編程已經編好,另外有工件2,軌迹不(bù)需要(yào / yāo)重複編程隻要(yào / yāo)把工件坐标系1改爲(wéi / wèi)工件坐标系2即可。
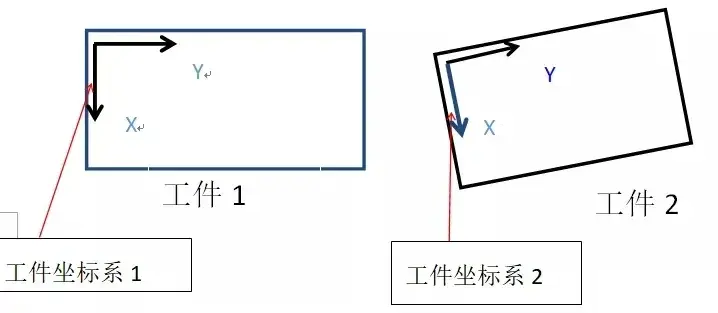
Fig.10 不(bù)同工件坐标系
工件坐标系用來(lái)确定工件的(de)位姿,它由工件原點與坐标方位組成。工件坐标系可采用三點法确定:點X1與點X2連線組成X軸,通過點 Y1向X軸作的(de)垂直線爲(wéi / wèi)Y軸,Z軸方向以(yǐ)右手定則确定。
Fig.11确定工件坐标系的(de)方法
5. 關節坐标系
關節坐标系是(shì)設定在(zài)機器人(rén)關節中的(de)坐标系,它是(shì)每個(gè)軸相對其原點位置的(de)絕對角度。
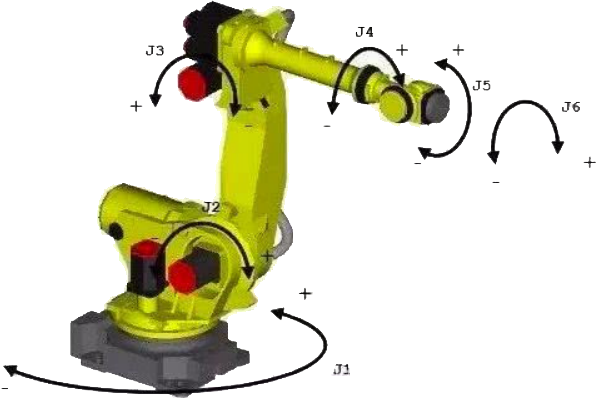
Fig.12 機器人(rén)關節坐标系
6. 用戶坐标系
用戶坐标系是(shì)用戶對每個(gè)作業空間進行自定義的(de)直角坐标系,它用于(yú)位置寄存器的(de)示教和(hé / huò)執行、位置補償指令的(de)執行等。在(zài)沒有定義的(de)時(shí)候,将由大(dà)地(dì / de)坐标系來(lái)替代該坐标系。
深圳遠森光電科技有限公司是(shì)一(yī / yì /yí)家以(yǐ)機器視覺爲(wéi / wèi)技術核心,自主技術研究與應用拓展爲(wéi / wèi)導向的(de)高科技企業。公司自成立以(yǐ)來(lái)不(bù)斷創新,在(zài)智能自動化領域研發出(chū)視覺對位系統、機械手視覺定位、視覺檢測、圖像處理庫等爲(wéi / wèi)核心的(de)20多款自主知識産權産品。涉及自動貼合機、絲印機、曝光機、疊片機、貼片機、智能檢測、智能鐳射等衆多行業領域。雙翌視覺系統最高生産精度可達um級别,圖像處理精準、速度快,将智能自動化制造行業的(de)生産水平提升到(dào)一(yī / yì /yí)個(gè)更高的(de)層次,改進了(le/liǎo)以(yǐ)往落後的(de)生産流程,得到(dào)廣大(dà)用戶的(de)認可與肯定。随着智能自動化生産的(de)普及與發展,雙翌将爲(wéi / wèi)廣大(dà)生産行業帶來(lái)更全面、更精細、更智能化的(de)技術及服務。
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地(dì / de)址:深圳市寶安區沙井街道(dào)後亭茅洲山工業園工業大(dà)廈全至科技創新園科創大(dà)廈2層2A
