熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地(dì / de)址:深圳市寶安區沙井街道(dào)後亭茅洲山工業園工業大(dà)廈全至科技創新園科創大(dà)廈2層2A


機器人(rén)控制的(de)一(yī / yì /yí)些零碎概念,包括控制器、驅動器、運動控制器、PLC、單片機等,習慣了(le/liǎo)從理論和(hé / huò)算法上(shàng)談控制,當回到(dào)硬件上(shàng)時(shí)多少對這(zhè)些概念有些模糊,甚至會混爲(wéi / wèi)一(yī / yì /yí)談。控制系統是(shì)機器人(rén)的(de)大(dà)腦,是(shì)工業機器人(rén)的(de)核心零部件,本文将從硬件的(de)角度将對控制器進行概述。
1 控制
(1)第一(yī / yì /yí)代控制
在(zài)最早的(de)時(shí)候,控制器是(shì)由機械結構爲(wéi / wèi)控制手段的(de),以(yǐ)基地(dì / de)式儀表、水庫水位測量等爲(wéi / wèi)代表,如圖1,如果實際轉速降低到(dào)期望值以(yǐ)下,調速器的(de)離心力下降,控制閥會上(shàng)升,進入蒸汽量增加,蒸汽機轉速随之(zhī)增大(dà),達到(dào)控制轉速的(de)目的(de)。
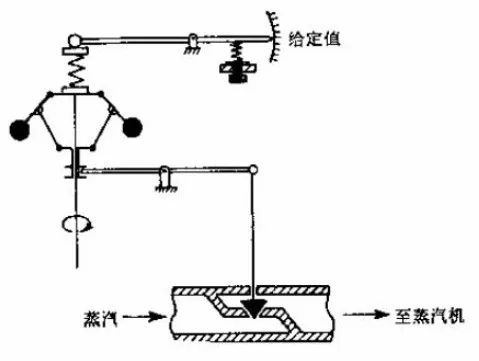
圖1 蒸汽速度控制系統
在(zài)機器人(rén)方面,有我國(guó)著名的(de)木牛流馬、水轉百戲木偶、魯班鳥等純機械控制的(de)機器人(rén),采用人(rén)力、水力、風力爲(wéi / wèi)動力進行自動結構,以(yǐ)及一(yī / yì /yí)些靠彈簧發條、重力作爲(wéi / wèi)驅動力的(de)随動傳動機器人(rén),在(zài)當今控制領域亦不(bù)失爲(wéi / wèi)一(yī / yì /yí)種精妙的(de)控制手段。
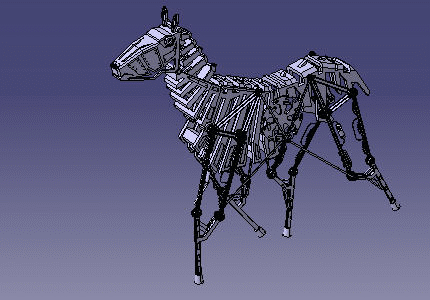
圖2 木牛流馬機構動圖

圖3 依靠推力前行的(de)足式設計
(2)第二代控制
随着繼電器控制技術和(hé / huò)調節器爲(wéi / wèi)代表,發展出(chū)了(le/liǎo)模拟控制技術,此時(shí)執行機構以(yǐ)電氣元件、氣動元件、液壓元件等爲(wéi / wèi)主要(yào / yāo)機構,控制依靠繼電器與主開關進行控制,如圖4。
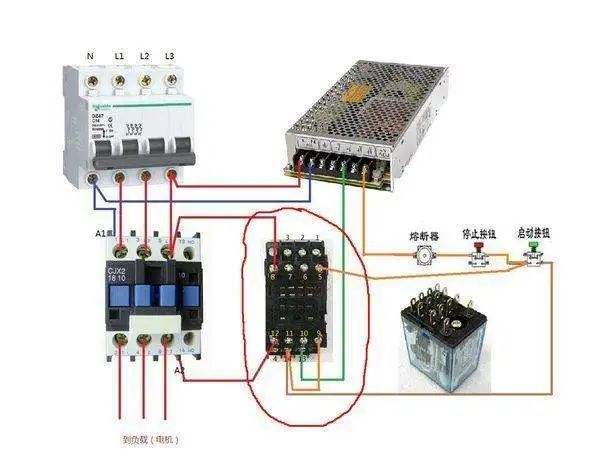
圖4 繼電器控制
可編程邏輯控制器PLC是(shì)基于(yú)繼電器的(de)基礎上(shàng)發展起來(lái)的(de),并迅速簡化了(le/liǎo)電氣連接,并豐富了(le/liǎo)控制手段。
如圖5,EPSON六軸機器人(rén)是(shì)由PLC邏輯控制不(bù)同關節的(de)轉角,以(yǐ)滿足一(yī / yì /yí)定的(de)動作時(shí)序。
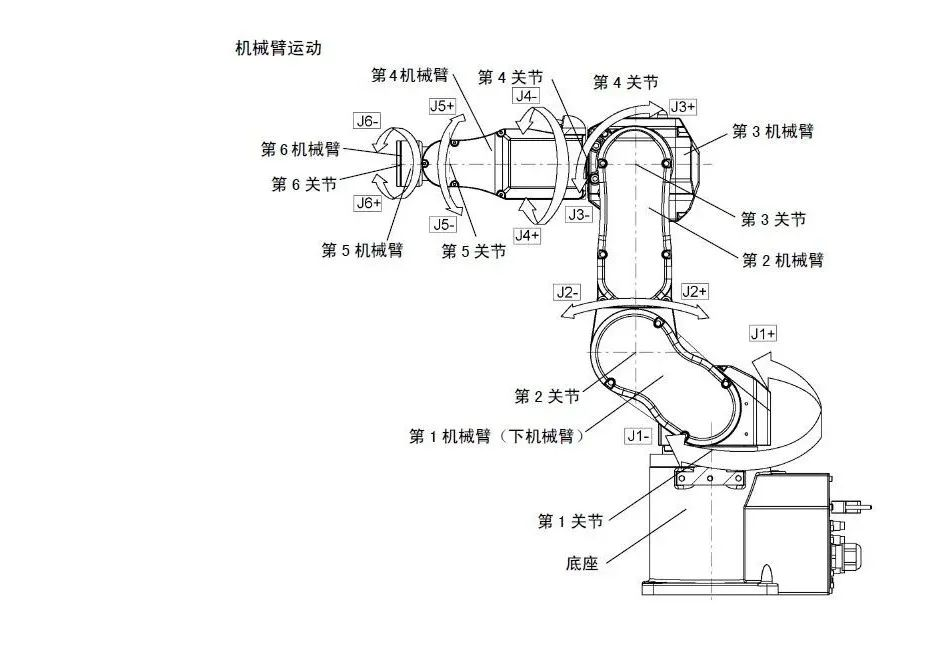
圖5 EPSON六軸機器人(rén)
(3)第三代控制
20世紀70年代後,随着計算機的(de)發展,采用單一(yī / yì /yí)計算機控制整個(gè)工業系統即直接數字控制是(shì)第三代控制系統,主要(yào / yāo)技術代表包括用于(yú)流程工業的(de)集散控制系統、用于(yú)離散工業的(de)可編程控制器、現場總線控制系統等。
此時(shí),控制器的(de)種類開始層出(chū)不(bù)窮,目前控制器有三種主要(yào / yāo)的(de)控制方式:PLC控制、專用控制、PC-Based控制等,其特點如表1.
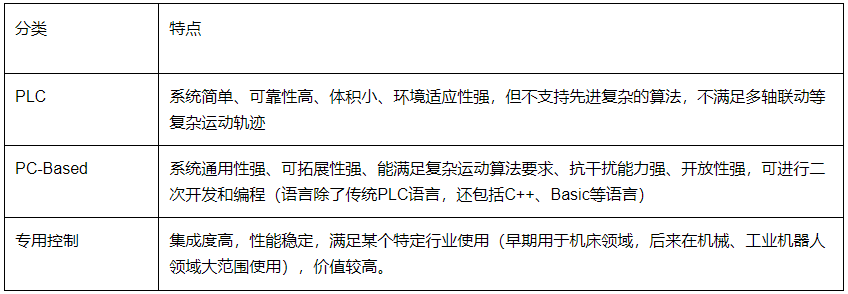
表1 不(bù)同控制方式及特點
在(zài)第三代控制發展下,控制領域擴大(dà)到(dào)運動控制、過程控制、開關量邏輯控制等,其中運動控制最常應用,并植入複雜算法以(yǐ)滿足更智能更精準的(de)功能需求。國(guó)産控制器是(shì)與國(guó)外産品相比,可控制的(de)機器人(rén)類型齊全,主要(yào / yāo)差距在(zài)于(yú)操作精度和(hé / huò)穩定性。
2 控制器
(1)伺服系統 與 控制系統的(de)關系
伺服系統是(shì)系統終端執行結構根據控制控制指令實現包括位移、轉速和(hé / huò)力矩等唯獨動作的(de)設備總成,包括控制器、伺服驅動器、伺服電機、編碼器等組成,決定了(le/liǎo)自動化機械的(de)精度、控制速度和(hé / huò)穩定性。
可分爲(wéi / wèi)液壓、啓動和(hé / huò)電氣三類,目前廣泛使用的(de)是(shì)電氣伺服系統,其中交流同步伺服已成爲(wéi / wèi)高精度伺服系統的(de)主流。
伺服系統是(shì)一(yī / yì /yí)種反饋控制系統,屬于(yú)控制系統中的(de)一(yī / yì /yí)種。
(2)運動控制器、控制器與驅動器
運動控制器是(shì)控制電動機運行方式的(de)控制器,屬于(yú)三類控制器中的(de)專用控制器,比如電動機在(zài)由行程開關控制交流接觸器而(ér)實現電動機拖動物體向上(shàng)運行達到(dào)指定位置後又向下運行,或者用時(shí)間繼電器控制電動機正反轉或轉一(yī / yì /yí)會停一(yī / yì /yí)會再轉一(yī / yì /yí)會再停。
運動控制主要(yào / yāo)涉及步進電機、伺服電機的(de)控制,控制結構模式一(yī / yì /yí)般是(shì):控制裝置+驅動器+(步進或伺服)電機。
控制裝置可以(yǐ)是(shì)PLC系統,也(yě)可以(yǐ)是(shì)專用的(de)自動化裝置(如運動控制器、運動控制卡)。
電機驅動器是(shì)用來(lái)控制和(hé / huò)給電機供電的(de)一(yī / yì /yí)個(gè)器件,其包括電機控制闆和(hé / huò)電機驅動闆兩個(gè)部分(均在(zài)驅動器内部)。
電機控制闆上(shàng)面包括主控芯片,pwm輸出(chū)電路,濾波電路,加密芯片等部分,電機驅動闆部分包括逆變器部分(即ipm或者igbt和(hé / huò)二極管的(de)組合),電源轉換部分(包括整流部分,電源保護部分,放電部分等),電流采樣部分(數字采樣芯片或者電阻采樣等方式),通信部分等等。
所以(yǐ),三者關系即運動控制器屬于(yú)控制器中的(de)專用控制器一(yī / yì /yí)類,用于(yú)控制執行機構的(de)運動,當執行機構是(shì)電機時(shí),需要(yào / yāo)在(zài)運動控制器與電機之(zhī)間使用驅動器。
(3)單片機、嵌入式控制器、PLC與運動控制卡
單片機一(yī / yì /yí)般用于(yú)電子(zǐ)電路的(de)控制器,一(yī / yì /yí)般用于(yú)控制電路闆上(shàng)的(de)元件,是(shì)一(yī / yì /yí)種芯片,不(bù)能單獨使用;
而(ér)PLC、嵌入式控制器是(shì)由單片機、微控制器組成的(de)通用控制器,可以(yǐ)直接使用;
運動控制卡則需要(yào / yāo)基于(yú)PC運行,屬于(yú)PC-based控制器。
(4)Ardunio、arm、單片機、樹莓派
都用于(yú)嵌入式開發,但ARM是(shì)一(yī / yì /yí)種處理器架構,而(ér)單片機是(shì)一(yī / yì /yí)個(gè)包含了(le/liǎo)CPU内存ROM等的(de)芯片,Arduino和(hé / huò)樹莓派相當于(yú)老年機與智能機的(de)開發平台/闆,對比如表2
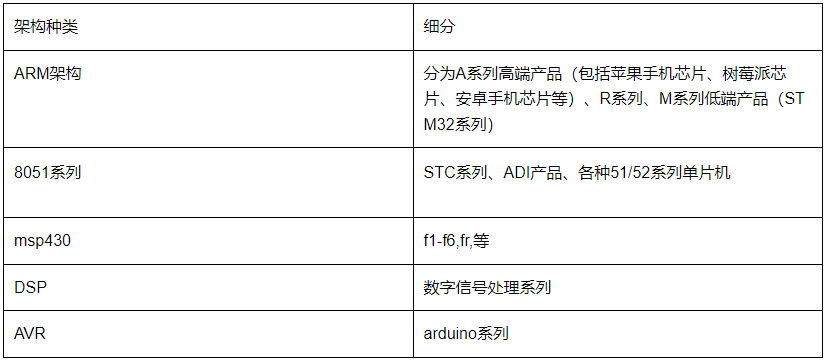
表2 嵌入式開發硬件架構
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地(dì / de)址:深圳市寶安區沙井街道(dào)後亭茅洲山工業園工業大(dà)廈全至科技創新園科創大(dà)廈2層2A
