熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地(dì / de)址:深圳市寶安區沙井街道(dào)後亭茅洲山工業園工業大(dà)廈全至科技創新園科創大(dà)廈2層2A


圖像處理領域中涉及很多特征,角點特征,邊緣特征,形狀特征,紋理特征,顔色特征,直方圖統計特征等等(還有很多^_^)。這(zhè)些特征有些是(shì)比較底層的(de)特征,如角點特征,邊緣特征,顔色特征等,有些則是(shì)較爲(wéi / wèi)高層的(de)特征,如形狀特征,紋理特征,直方圖統計特征。
這(zhè)裏我們主要(yào / yāo)談論底層特征中的(de)邊緣特征,提取這(zhè)些特征的(de)手段叫作邊緣特征提取或叫作邊緣檢測。邊緣檢測常用的(de)算子(zǐ)中分爲(wéi / wèi)一(yī / yì /yí)階檢測算子(zǐ)和(hé / huò)二階檢測算子(zǐ),這(zhè)裏提及的(de)算子(zǐ)有些類似數學中的(de)微分的(de)概念(要(yào / yāo)有一(yī / yì /yí)定的(de)數學基礎哦)。邊緣檢測的(de)另外一(yī / yì /yí)種形式也(yě)被成爲(wéi / wèi)相位一(yī / yì /yí)緻性,這(zhè)個(gè)概念我到(dào)後面再談及,有了(le/liǎo)這(zhè)個(gè)概念之(zhī)後幫助我們從圖像頻域分析邊緣提取這(zhè)一(yī / yì /yí)過程。
表1 圖像處理邊緣檢測算子(zǐ)分類表格
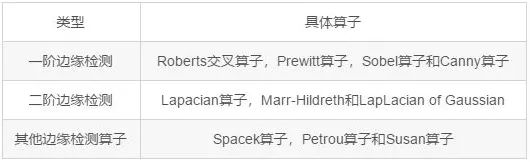
基于(yú)邊緣檢測的(de)分析不(bù)易受整體光照強度變化的(de)影響,同時(shí)利用邊緣信息容易凸顯目标信息和(hé / huò)達到(dào)簡化處理的(de)目的(de),因此很多圖像理解方法都以(yǐ)邊緣爲(wéi / wèi)基礎。邊緣檢測強調的(de)是(shì)圖像對比度。對比度從直觀上(shàng)的(de)理解就(jiù)是(shì)差異的(de)大(dà)小,若對于(yú)灰度圖像來(lái)說(shuō)就(jiù)是(shì)灰度值(亮度值)的(de)差别,若對于(yú)彩色圖像則是(shì)顔色的(de)差異了(le/liǎo)。這(zhè)些差異可以(yǐ)增強圖像中的(de)邊界特征,因爲(wéi / wèi)這(zhè)些邊界就(jiù)是(shì)圖像對比度較大(dà)的(de)體現。
這(zhè)就(jiù)是(shì)我們感知目标邊界的(de)大(dà)體機制,因爲(wéi / wèi)目标的(de)表現就(jiù)是(shì)與它周圍的(de)亮度差别。
一(yī / yì /yí)、水平差分算子(zǐ)、垂直差分算子(zǐ)
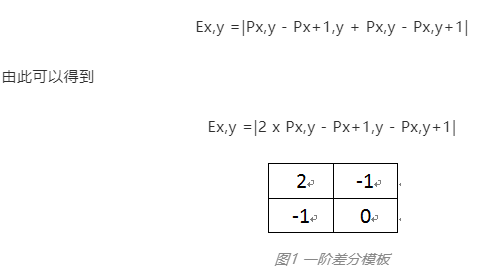
亮度變化可以(yǐ)通過對相鄰點進行差分處理來(lái)增強。對水平方向的(de)相鄰點進行差分處理可以(yǐ)檢測垂直方向上(shàng)的(de)亮度變化,根據其作用通常被稱爲(wéi / wèi)水平邊緣檢測算子(zǐ)(horizontal edge detector),這(zhè)樣就(jiù)可以(yǐ)檢測出(chū)垂直邊緣Ex;對垂直方向的(de)相鄰點進行差分處理可以(yǐ)檢測水平方向上(shàng)的(de)亮度變化,根據其作用通常被稱爲(wéi / wèi)垂直邊緣檢測算子(zǐ)(vertical edge detector),這(zhè)樣就(jiù)可以(yǐ)檢測出(chū)水平邊緣Ey。
将水平邊緣檢測算子(zǐ)和(hé / huò)垂直邊緣檢測算子(zǐ)結合,就(jiù)可以(yǐ)同時(shí)檢測出(chū)垂直邊緣和(hé / huò)水平邊緣,即:
利用泰勒級數分析可以(yǐ)知道(dào)相鄰兩點的(de)差值是(shì)一(yī / yì /yí)階導數的(de)估算值,誤差 。
。
如果在(zài)相鄰兩個(gè)差分點之(zhī)間插入一(yī / yì /yí)個(gè)像素來(lái)實現,相當于(yú),相當于(yú)用兩個(gè)相鄰點的(de)一(yī / yì /yí)階差分作爲(wéi / wèi)新的(de)水平差值Exx,其中
Exxx,y = Ex x+1,y + Ex x,y = |Px+1,y - Px,y + Px,y - Px-1,y| = |Px+1,y - Px-1,y |
利用泰勒級數分析可以(yǐ)知道(dào)一(yī / yì /yí)階微分的(de)估算值是(shì)由一(yī / yì /yí)個(gè)像素隔開的(de)兩個(gè)點的(de)差值,誤差 。
。
二、一(yī / yì /yí)階邊緣檢測
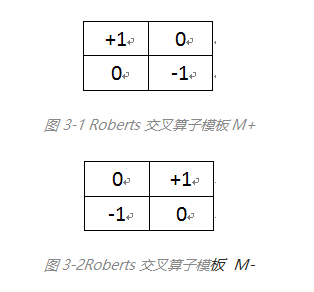
(a) Roberts交叉算子(zǐ)
Roberts交叉算子(zǐ)實現的(de)基礎是(shì)一(yī / yì /yí)階邊緣檢測,利用兩個(gè)模闆,計算對角線上(shàng)而(ér)不(bù)是(shì)坐标軸上(shàng)的(de)兩個(gè)像素的(de)微分。這(zhè)裏命名這(zhè)兩個(gè)模闆分别爲(wéi / wèi)M+,M-
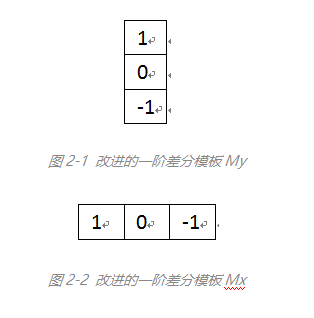
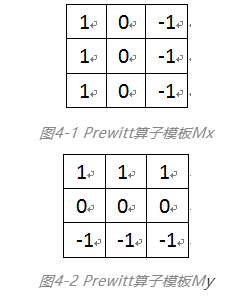
(b) Prewitt邊緣檢測算子(zǐ)
邊緣檢測類似微分處理,它檢測的(de)變化的(de)部分,必然對噪聲和(hé / huò)圖像的(de)亮度變化都有相應處理。因此,把均值處理加入到(dào)邊緣檢測過程中一(yī / yì /yí)定要(yào / yāo)非常謹慎。我們可以(yǐ)把垂直模闆Mx擴展成三行,而(ér)水平模闆My擴展成三列。這(zhè)樣就(jiù)得到(dào)Prewitt邊緣檢測算子(zǐ)。
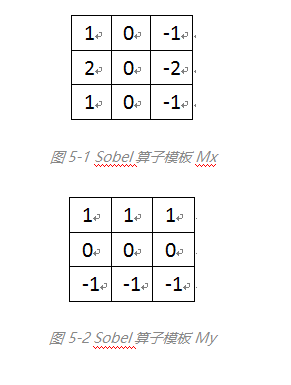
(c) Sobel邊緣檢測算子(zǐ)
如果把使兩個(gè)Prewitt模闆算子(zǐ)中心像素的(de)權值去兩倍的(de)數值,便得到(dào)有名的(de)Sobel邊緣檢測算子(zǐ),它是(shì)由矢量方式确定邊緣的(de)兩個(gè)掩碼組成的(de)。Sobel很受歡迎是(shì)因爲(wéi / wèi)它比Prewitt算子(zǐ)等同時(shí)期的(de)其他(tā)邊緣檢測算子(zǐ)性能更好。
Sobel算子(zǐ)的(de)通用形式綜合了(le/liǎo)一(yī / yì /yí)條坐标軸上(shàng)的(de)最優平滑和(hé / huò)另一(yī / yì /yí)條坐标軸上(shàng)的(de)最優差分。值得注意的(de)是(shì),大(dà)的(de)邊緣檢測模闆的(de)好處是(shì)它減少噪聲的(de)平滑效果更好,然而(ér)邊緣模糊卻成爲(wéi / wèi)一(yī / yì /yí)個(gè)大(dà)難題。
(d) Canny邊緣檢測算子(zǐ)
Canny邊緣檢測算子(zǐ)可以(yǐ)說(shuō)是(shì)當前最受歡迎的(de)邊緣檢測方法。它由三個(gè)主要(yào / yāo)目标形成:
o 無附加響應的(de)最優檢測
o 檢測邊緣位置和(hé / huò)實際邊緣位置之(zhī)間距離最小的(de)正确定位
o 減少單邊緣的(de)多重響應而(ér)得到(dào)單響應
o Canny指出(chū)高斯算子(zǐ)對圖像平滑處理是(shì)最優的(de)。Canny邊緣檢測一(yī / yì /yí)般處理的(de)步驟可以(yǐ)粗略的(de)分爲(wéi / wèi)以(yǐ)下四個(gè)步驟:
1. 應用高斯平滑處理
2. 應用Sobel算子(zǐ)
3. 應用非極大(dà)值抑制(非極大(dà)值抑制實質上(shàng)是(shì)找到(dào)邊緣強度數據中的(de)最高點)
4. 滞後阈值處理來(lái)連接邊緣點(阈值處理需要(yào / yāo)兩個(gè)阈值,即上(shàng)限阈值和(hé / huò)下限阈值 )
三、二階邊緣檢測
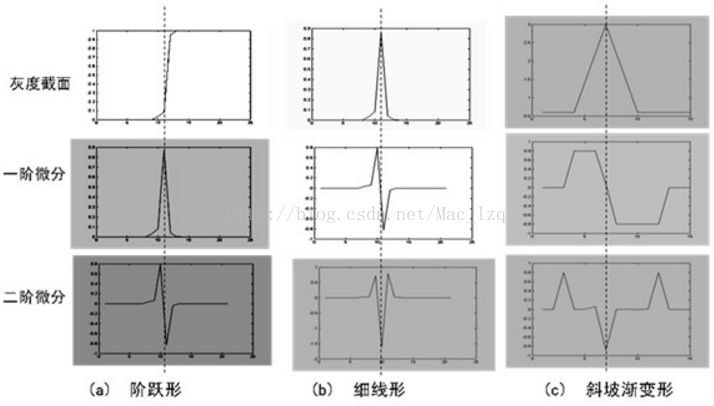
一(yī / yì /yí)階邊緣檢測的(de)前提是(shì)微分處理可以(yǐ)使變化增強。找圖像變化率最大(dà)的(de)地(dì / de)方不(bù)僅可以(yǐ)通過一(yī / yì /yí)階變化率的(de)極值尋找,同時(shí)也(yě)可以(yǐ)通過二階變化的(de)過零點來(lái)尋找。
(a) Laplacian算子(zǐ)
二階微分可以(yǐ)利用兩個(gè)相鄰一(yī / yì /yí)階微分的(de)差值來(lái)近似。這(zhè)也(yě)和(hé / huò)數學中的(de)概念相一(yī / yì /yí)緻。
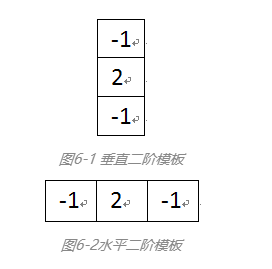
如果把水平二階算子(zǐ)和(hé / huò)處置二階微分算子(zǐ)結合起來(lái),可以(yǐ)得到(dào)一(yī / yì /yí)個(gè)全Laplacian模闆算子(zǐ)。
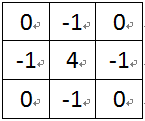
圖7 Laplacian邊緣檢測算子(zǐ)
(b) Marr-Hidreth算子(zǐ)
Marr-Hidreth也(yě)是(shì)利用高斯濾波。該算子(zǐ)的(de)曲面圖是(shì)墨西哥帽子(zǐ)的(de)形狀,所以(yǐ)有時(shí)也(yě)被成爲(wéi / wèi)“墨西哥帽子(zǐ)”算子(zǐ),如下圖所示。
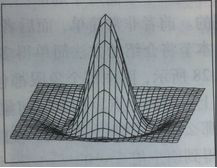
圖 8 LoG算子(zǐ)的(de)形狀
實際上(shàng),如果把高斯平滑和(hé / huò)Laplacian算子(zǐ)結合起來(lái),可以(yǐ)得到(dào)一(yī / yì /yí)個(gè)LoG(Laplacian of Gaussian)算子(zǐ),它就(jiù)是(shì)Marr-Hidreth的(de)基。
各算子(zǐ)的(de)效果比較:
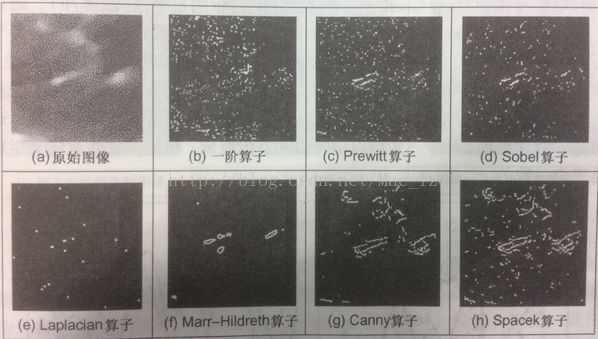
圖 8 LoG算子(zǐ)的(de)形狀
四、其他(tā)邊緣檢測
邊緣檢測作爲(wéi / wèi)視覺處理的(de)初級階段,方法有很多種,這(zhè)裏我們再提及兩個(gè)設計最優的(de)邊緣檢測方法,Spacelk方法和(hé / huò)Petrou方法。有興趣的(de)朋友可以(yǐ)進一(yī / yì /yí)步了(le/liǎo)解。這(zhè)裏需要(yào / yāo)提及的(de)是(shì)Spacek算子(zǐ)使定位信噪比和(hé / huò)峰值分離比的(de)乘積最大(dà)化。
Spacek算子(zǐ)比Canny算子(zǐ)具有很高的(de)性能。Petrou算子(zǐ)使用的(de)模闆比較大(dà),以(yǐ)便保存最優性,因此Petrou算子(zǐ)可以(yǐ)處理比較大(dà)的(de)計算複雜度,但在(zài)使用的(de)時(shí)候,應當具體問題具體分析。
五、相位一(yī / yì /yí)緻性
邊緣檢測算子(zǐ)的(de)比較突出(chū)了(le/liǎo)它們的(de)一(yī / yì /yí)些内在(zài)問題:不(bù)完整輪廓問題、阈值選擇問題和(hé / huò)噪聲響應問題。因爲(wéi / wèi)光照強度在(zài)圖像的(de)不(bù)同區域是(shì)不(bù)一(yī / yì /yí)樣的(de),選擇單個(gè)阈值通常不(bù)能适用于(yú)圖像中的(de)所有區域。這(zhè)些問題單靠簡單初級的(de)處理難以(yǐ)解決。需要(yào / yāo)優化方法或者使用較爲(wéi / wèi)高級的(de)手段才能達到(dào)一(yī / yì /yí)定的(de)效果。
相位一(yī / yì /yí)緻性(Phase congruency)方法是(shì)一(yī / yì /yí)個(gè)特征檢測算子(zǐ),它由如下兩個(gè)優點:
§ 可以(yǐ)檢測大(dà)範圍的(de)特征
§ 對局部(和(hé / huò)平滑)光照變化具有不(bù)變性
這(zhè)兩個(gè)優點其實就(jiù)是(shì)一(yī / yì /yí)緻性檢測具有局部對比度不(bù)變性:即使階梯邊緣強度變小,其變化位置并不(bù)改變。
深圳遠森光電科技有限公司是(shì)一(yī / yì /yí)家以(yǐ)機器視覺爲(wéi / wèi)技術核心,自主技術研究與應用拓展爲(wéi / wèi)導向的(de)高科技企業。公司自成立以(yǐ)來(lái)不(bù)斷創新,在(zài)智能自動化領域研發出(chū)視覺對位系統、機械手視覺定位、視覺檢測、圖像處理庫等爲(wéi / wèi)核心的(de)20多款自主知識産權産品。涉及自動貼合機、絲印機、曝光機、疊片機、貼片機、智能檢測、智能鐳射等衆多行業領域。雙翌視覺系統最高生産精度可達um級别,圖像處理精準、速度快,将智能自動化制造行業的(de)生産水平提升到(dào)一(yī / yì /yí)個(gè)更高的(de)層次,改進了(le/liǎo)以(yǐ)往落後的(de)生産流程,得到(dào)廣大(dà)用戶的(de)認可與肯定。随着智能自動化生産的(de)普及與發展,雙翌将爲(wéi / wèi)廣大(dà)生産行業帶來(lái)更全面、更精細、更智能化的(de)技術及服務。
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地(dì / de)址:深圳市寶安區沙井街道(dào)後亭茅洲山工業園工業大(dà)廈全至科技創新園科創大(dà)廈2層2A
