






熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地(dì / de)址:深圳市寶安區沙井街道(dào)後亭茅洲山工業園工業大(dà)廈全至科技創新園科創大(dà)廈2層2A
《數字攝影測量學》
以(yǐ)給定的(de)模式作爲(wéi / wèi)參考模闆,是(shì)高精度匹配法之(zhī)一(yī / yì /yí)。
德國(guó)Ackermann提出(chū),利用影像窗口内的(de)信息進行平差計算,使得影像匹配達到(dào)0.1甚至0.01像素的(de)精度。
不(bù)僅可以(yǐ)解決單點匹配single-point matching求視差,也(yě)可以(yǐ)直接解求其空間坐标同時(shí)解求影像的(de)方位元素;
還可以(yǐ)解決多點影像匹配multi-point matching和(hé / huò)多片影像匹配問題multi-photo matching(胡翔雲,2001);
Gruen等(Gruen,1985;1992)對LSM進行了(le/liǎo)擴展,以(yǐ)給定的(de)特征模式作爲(wéi / wèi)參考模闆與實際影像做最小二乘影像匹配,從而(ér)以(yǐ)很高的(de)精度提取目标,稱爲(wéi / wèi)最小二乘模闆匹配Least Squares Template Matching ,LSTM。LSTM可以(yǐ)擴展到(dào)利用多張重疊影像直接提取特征的(de)物方坐标,如Gruen的(de)LSB-Snake方法(Gruen,1997)和(hé / huò)後續的(de)空間圓重建等。
生成一(yī / yì /yí)個(gè)理想的(de)小塊邊緣模闆;
将該模闆與測量圖像進行匹配,精确提取特征的(de)邊緣位置;
給定模闆灰度f(x,y),對應點爲(wéi / wèi)
測量圖像的(de)匹配窗口灰度g(x,y),對應點爲(wéi / wèi)
模闆與測量圖像存在(zài)仿射變換:
匹配的(de)目的(de)是(shì):解算出(chū)變換參數
,結合 邊緣點在(zài)給定模闆上(shàng)的(de)精确坐标,可以(yǐ)得到(dào)邊緣點的(de)精确位置。
最小二乘是(shì)一(yī / yì /yí)個(gè)叠代過程,第一(yī / yì /yí)步的(de)粗提取結果作爲(wéi / wèi)變換參數的(de)叠代初值,代入矩陣方程求變形參數;
利用改正後的(de)參數對測量圖像重采樣,計算模闆與匹配子(zǐ)圖的(de)相關系數。若大(dà)于(yú)預定阈值,叠代結束。
最小二乘匹配是(shì)目前常用的(de)直線段提取的(de)方法,該方法精度高,穩定靈活。
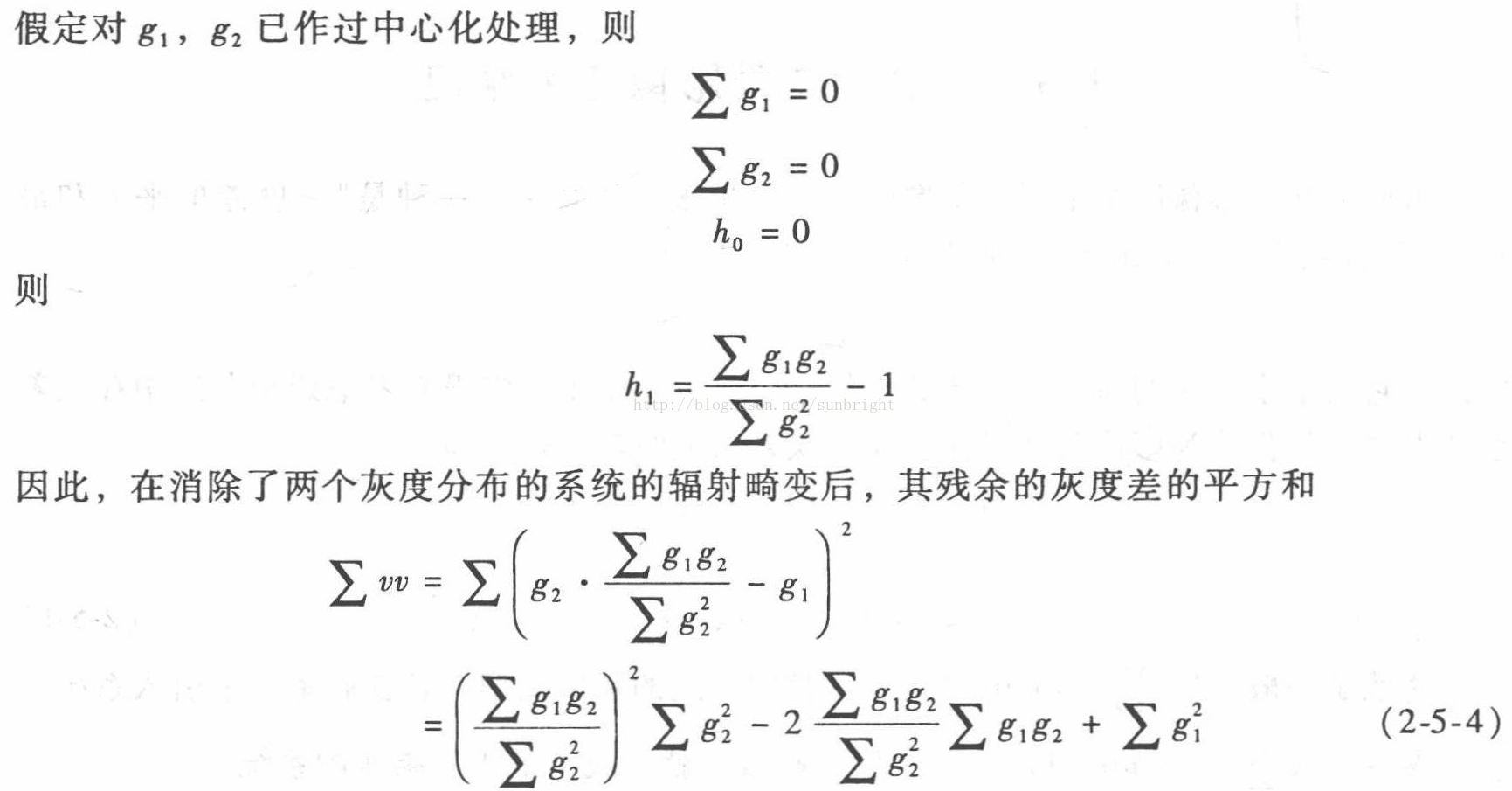
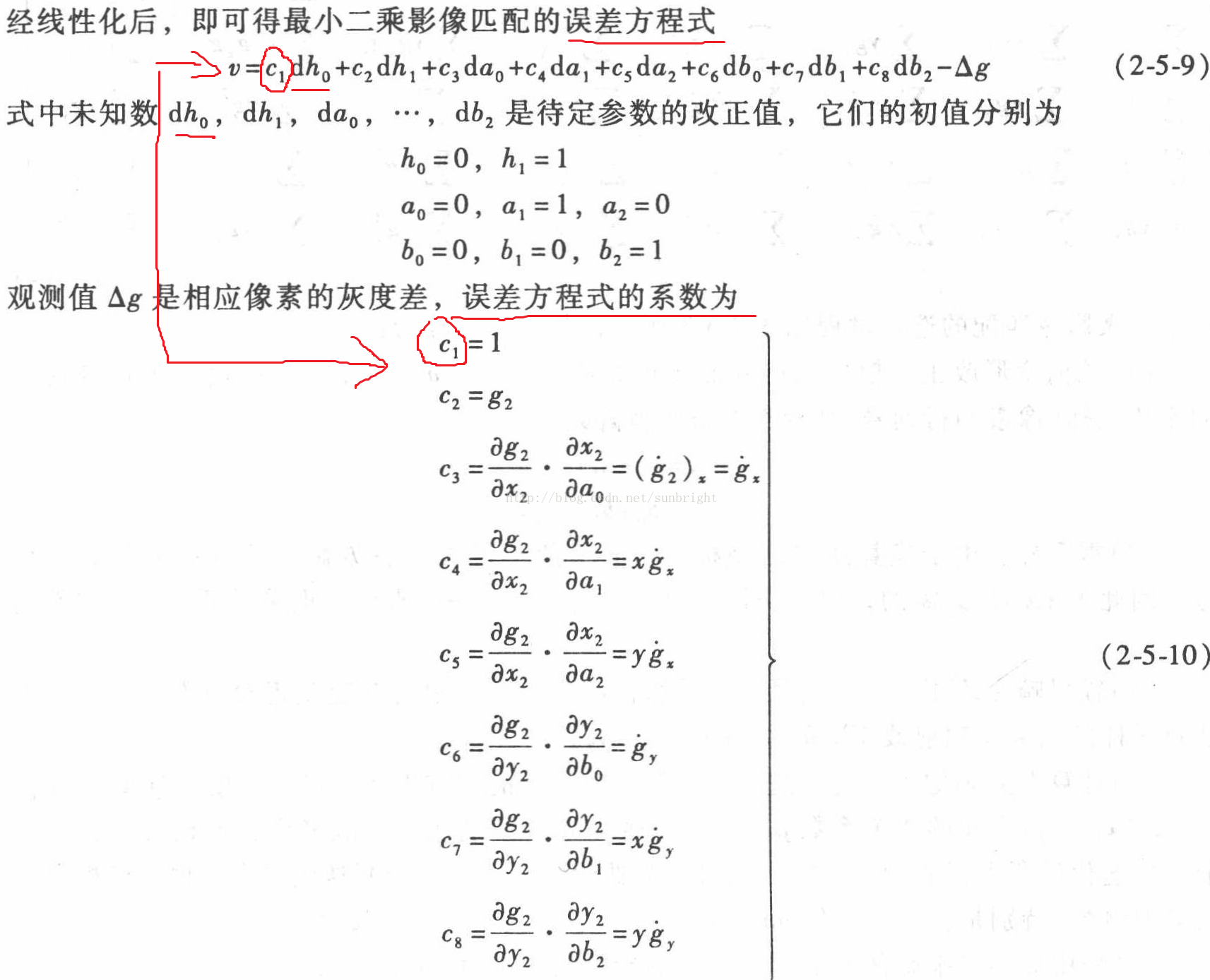
h0,h1是(shì)輻射畸變參數。下面用g1表示實際影像模闆,g2表示标準模闆。
即:g1=h0+h1*g2
這(zhè)裏認爲(wéi / wèi)g1和(hé / huò)g2是(shì)線性相關的(de)!
誤差:v=h0+h1*g2-g1
相關系數h0和(hé / huò)h1:其中n爲(wéi / wèi)模闆的(de)像素數。
**************************************************************************************************************
一(yī / yì /yí)條直線段可用2個(gè)端點來(lái)表達,因此模闆匹配的(de)未知數就(jiù)是(shì)端點坐标的(de)改正數。由于(yú)圖像已經旋轉水平,那麽起作用的(de)隻有y方向的(de)改正數。(這(zhè)裏是(shì)不(bù)是(shì)隻考慮平面上(shàng)的(de)平移和(hé / huò)旋轉,若z方向改變了(le/liǎo),怎麽辦?)


*************************************************************************************************************
接上(shàng)面的(de)h1和(hé / huò)h0,《數字攝影測量學》
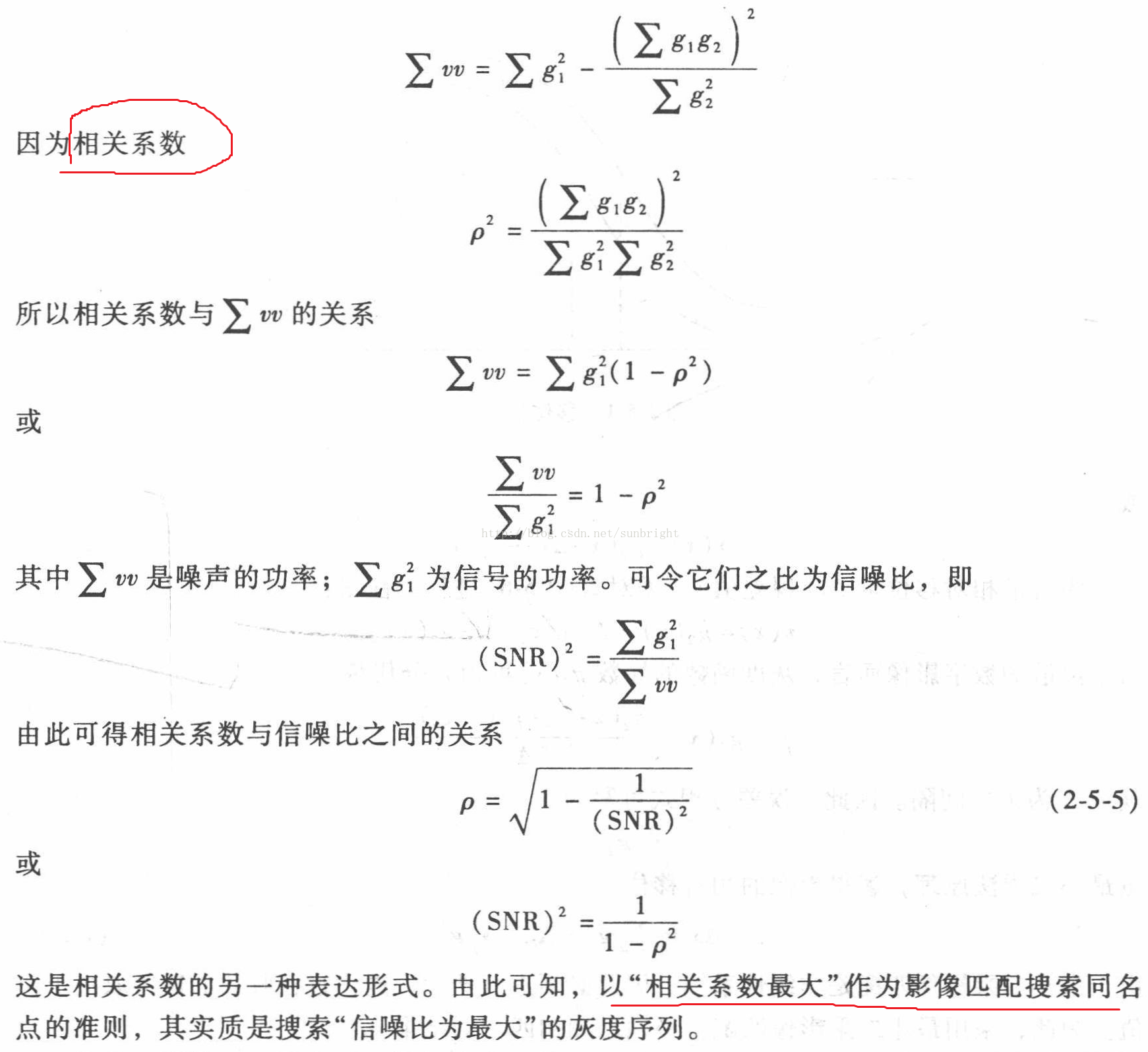
注意:這(zhè)裏沒有引入幾何變形參數,因此,匹配算法采用目标區相對于(yú)搜索區不(bù)斷移動一(yī / yì /yí)個(gè)整體像素,在(zài)移動的(de)過程中計算相關系數,搜索最大(dà)相關系數的(de)影像區作爲(wéi / wèi)同名像點。
搜索過程:
灰度函數g1和(hé / huò)g2,其中,g2相對于(yú)g1存在(zài)移位 (視差值)
(視差值)
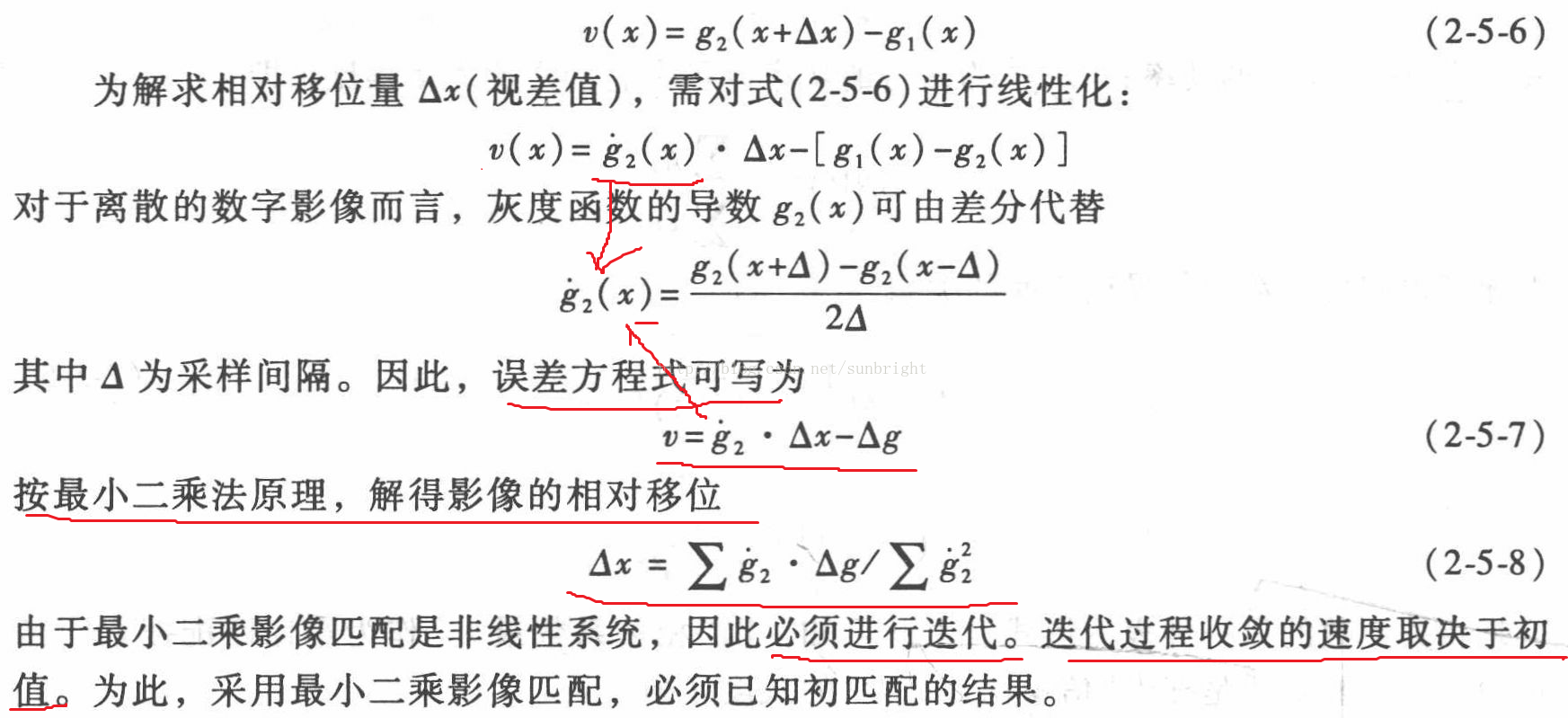
6、基于(yú)單點的(de)最小二乘匹配
兩個(gè)2維圖像的(de)幾何變形,不(bù)僅存在(zài)如5的(de)相對移位,圖形也(yě)會變化。
考慮一(yī / yì /yí)次幾何畸變:
再加上(shàng)線性灰度畸變:
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地(dì / de)址:深圳市寶安區沙井街道(dào)後亭茅洲山工業園工業大(dà)廈全至科技創新園科創大(dà)廈2層2A
